ਡਾਇਰੈਕਟਰੀ
1. ਮੁੱਖ ਸੰਕਲਪ ਅਤੇ ਮੈਟ੍ਰਿਕਸ
2. ਮਾਪ ਤਕਨੀਕਾਂ
3. ਡੇਟਾ ਪ੍ਰੋਸੈਸਿੰਗ ਅਤੇ ਗਲਤੀਆਂ
4. ਪ੍ਰਕਿਰਿਆ ਦੇ ਪ੍ਰਭਾਵ
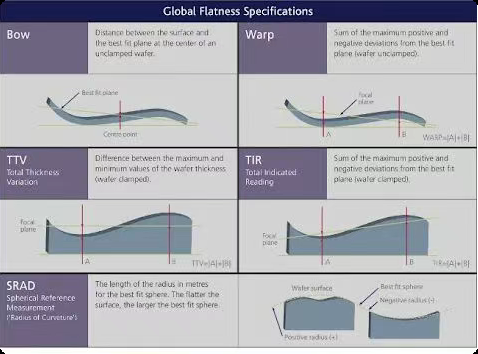
ਸੈਮੀਕੰਡਕਟਰ ਨਿਰਮਾਣ ਵਿੱਚ, ਵੇਫਰਾਂ ਦੀ ਮੋਟਾਈ ਇਕਸਾਰਤਾ ਅਤੇ ਸਤਹ ਸਮਤਲਤਾ ਪ੍ਰਕਿਰਿਆ ਉਪਜ ਨੂੰ ਪ੍ਰਭਾਵਿਤ ਕਰਨ ਵਾਲੇ ਮਹੱਤਵਪੂਰਨ ਕਾਰਕ ਹਨ। ਮੁੱਖ ਮਾਪਦੰਡ ਜਿਵੇਂ ਕਿ ਟੋਟਲ ਥਿਕਨੇਸ ਵੇਰੀਏਸ਼ਨ (TTV), ਬੋ (ਆਰਕਿਊਏਟ ਵਾਰਪੇਜ), ਵਾਰਪ (ਗਲੋਬਲ ਵਾਰਪੇਜ), ਅਤੇ ਮਾਈਕ੍ਰੋਵਾਰਪ (ਨੈਨੋ-ਟੌਪੋਗ੍ਰਾਫੀ) ਫੋਟੋਲਿਥੋਗ੍ਰਾਫੀ ਫੋਕਸ, ਕੈਮੀਕਲ ਮਕੈਨੀਕਲ ਪਾਲਿਸ਼ਿੰਗ (CMP), ਅਤੇ ਥਿਨ-ਫਿਲਮ ਡਿਪੋਜ਼ੀਸ਼ਨ ਵਰਗੀਆਂ ਕੋਰ ਪ੍ਰਕਿਰਿਆਵਾਂ ਦੀ ਸ਼ੁੱਧਤਾ ਅਤੇ ਸਥਿਰਤਾ ਨੂੰ ਸਿੱਧਾ ਪ੍ਰਭਾਵਤ ਕਰਦੇ ਹਨ।
ਮੂਲ ਸੰਕਲਪ ਅਤੇ ਮੈਟ੍ਰਿਕਸ
ਟੀਟੀਵੀ (ਕੁੱਲ ਮੋਟਾਈ ਭਿੰਨਤਾ)
ਵਾਰਪ
ਵਾਰਪ ਰੈਫਰੈਂਸ ਪਲੇਨ ਦੇ ਸਾਪੇਖਕ ਸਾਰੇ ਸਤਹ ਬਿੰਦੂਆਂ ਵਿੱਚ ਵੱਧ ਤੋਂ ਵੱਧ ਪੀਕ-ਟੂ-ਵੈਲੀ ਫਰਕ ਨੂੰ ਮਾਪਦਾ ਹੈ, ਇੱਕ ਮੁਕਤ ਅਵਸਥਾ ਵਿੱਚ ਵੇਫਰ ਦੀ ਸਮੁੱਚੀ ਸਮਤਲਤਾ ਦਾ ਮੁਲਾਂਕਣ ਕਰਦਾ ਹੈ।
ਮਾਪਣ ਦੀਆਂ ਤਕਨੀਕਾਂ
1. ਟੀਟੀਵੀ ਮਾਪਣ ਦੇ ਤਰੀਕੇ
- ਦੋਹਰੀ-ਸਤਹ ਪ੍ਰੋਫਾਈਲੋਮੈਟਰੀ
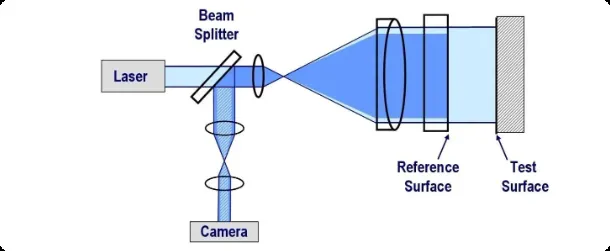
- ਫਿਜ਼ੇਉ ਇੰਟਰਫੇਰੋਮੈਟਰੀ:ਇੱਕ ਸੰਦਰਭ ਸਮਤਲ ਅਤੇ ਵੇਫਰ ਸਤ੍ਹਾ ਦੇ ਵਿਚਕਾਰ ਦਖਲਅੰਦਾਜ਼ੀ ਵਾਲੀਆਂ ਕਿਨਾਰੀਆਂ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ। ਨਿਰਵਿਘਨ ਸਤਹਾਂ ਲਈ ਢੁਕਵਾਂ ਪਰ ਵੱਡੇ-ਵਕਰ ਵਾਲੇ ਵੇਫਰਾਂ ਦੁਆਰਾ ਸੀਮਿਤ।
- ਵਾਈਟ ਲਾਈਟ ਸਕੈਨਿੰਗ ਇੰਟਰਫੇਰੋਮੈਟਰੀ (SWLI):ਘੱਟ-ਸੰਗਠਿਤ ਰੌਸ਼ਨੀ ਦੇ ਲਿਫਾਫਿਆਂ ਰਾਹੀਂ ਸੰਪੂਰਨ ਉਚਾਈਆਂ ਨੂੰ ਮਾਪਦਾ ਹੈ। ਕਦਮ ਵਰਗੀਆਂ ਸਤਹਾਂ ਲਈ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਪਰ ਮਕੈਨੀਕਲ ਸਕੈਨਿੰਗ ਗਤੀ ਦੁਆਰਾ ਸੀਮਤ।
- ਕਨਫੋਕਲ ਢੰਗ:ਪਿਨਹੋਲ ਜਾਂ ਡਿਸਪਰੇਸ਼ਨ ਸਿਧਾਂਤਾਂ ਰਾਹੀਂ ਸਬ-ਮਾਈਕ੍ਰੋਨ ਰੈਜ਼ੋਲਿਊਸ਼ਨ ਪ੍ਰਾਪਤ ਕਰੋ। ਖੁਰਦਰੀ ਜਾਂ ਪਾਰਦਰਸ਼ੀ ਸਤਹਾਂ ਲਈ ਆਦਰਸ਼ ਪਰ ਪੁਆਇੰਟ-ਬਾਈ-ਪੁਆਇੰਟ ਸਕੈਨਿੰਗ ਕਾਰਨ ਹੌਲੀ।
- ਲੇਜ਼ਰ ਤਿਕੋਣ:ਤੇਜ਼ ਪ੍ਰਤੀਕਿਰਿਆ ਪਰ ਸਤਹ ਪ੍ਰਤੀਬਿੰਬ ਭਿੰਨਤਾਵਾਂ ਤੋਂ ਸ਼ੁੱਧਤਾ ਦੇ ਨੁਕਸਾਨ ਦੀ ਸੰਭਾਵਨਾ।
- ਟ੍ਰਾਂਸਮਿਸ਼ਨ/ਰਿਫਲੈਕਸ਼ਨ ਕਪਲਿੰਗ
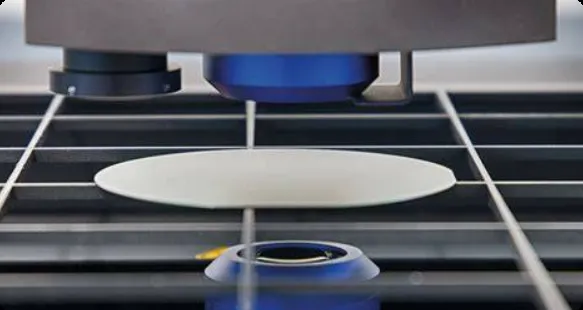
- ਡੁਅਲ-ਹੈੱਡ ਕੈਪੇਸੀਟੈਂਸ ਸੈਂਸਰ: ਦੋਵਾਂ ਪਾਸਿਆਂ 'ਤੇ ਸੈਂਸਰਾਂ ਦੀ ਸਮਮਿਤੀ ਪਲੇਸਮੈਂਟ ਮੋਟਾਈ ਨੂੰ T = L – d₁ – d₂ (L = ਬੇਸਲਾਈਨ ਦੂਰੀ) ਦੇ ਰੂਪ ਵਿੱਚ ਮਾਪਦੀ ਹੈ। ਤੇਜ਼ ਪਰ ਸਮੱਗਰੀ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਪ੍ਰਤੀ ਸੰਵੇਦਨਸ਼ੀਲ।
- ਅੰਡਾਕਾਰ/ਸਪੈਕਟ੍ਰੋਸਕੋਪਿਕ ਰਿਫਲੈਕਟੋਮੈਟਰੀ: ਪਤਲੀ-ਫਿਲਮ ਮੋਟਾਈ ਲਈ ਪ੍ਰਕਾਸ਼-ਮਾਦੇ ਦੇ ਪਰਸਪਰ ਪ੍ਰਭਾਵ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਦਾ ਹੈ ਪਰ ਥੋਕ ਟੀਟੀਵੀ ਲਈ ਅਣਉਚਿਤ ਹੈ।
2. ਧਨੁਸ਼ ਅਤੇ ਤਾਣੇ ਦਾ ਮਾਪ
- ਮਲਟੀ-ਪ੍ਰੋਬ ਕੈਪੇਸੀਟੈਂਸ ਐਰੇ: ਤੇਜ਼ 3D ਪੁਨਰ ਨਿਰਮਾਣ ਲਈ ਏਅਰ-ਬੇਅਰਿੰਗ ਸਟੇਜ 'ਤੇ ਪੂਰੇ-ਫੀਲਡ ਉਚਾਈ ਡੇਟਾ ਨੂੰ ਕੈਪਚਰ ਕਰੋ।
- ਸਟ੍ਰਕਚਰਡ ਲਾਈਟ ਪ੍ਰੋਜੈਕਸ਼ਨ: ਆਪਟੀਕਲ ਸ਼ੇਪਿੰਗ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹੋਏ ਹਾਈ-ਸਪੀਡ 3D ਪ੍ਰੋਫਾਈਲਿੰਗ।
- ਘੱਟ-ਐਨਏ ਇੰਟਰਫੇਰੋਮੈਟਰੀ: ਉੱਚ-ਰੈਜ਼ੋਲਿਊਸ਼ਨ ਸਤਹ ਮੈਪਿੰਗ ਪਰ ਵਾਈਬ੍ਰੇਸ਼ਨ-ਸੰਵੇਦਨਸ਼ੀਲ।
3. ਮਾਈਕ੍ਰੋਵਾਰਪ ਮਾਪ
- ਸਥਾਨਿਕ ਬਾਰੰਬਾਰਤਾ ਵਿਸ਼ਲੇਸ਼ਣ:
- ਉੱਚ-ਰੈਜ਼ੋਲਿਊਸ਼ਨ ਵਾਲੀ ਸਤ੍ਹਾ ਭੂਗੋਲਿਕਤਾ ਪ੍ਰਾਪਤ ਕਰੋ।
- 2D FFT ਰਾਹੀਂ ਪਾਵਰ ਸਪੈਕਟ੍ਰਲ ਘਣਤਾ (PSD) ਦੀ ਗਣਨਾ ਕਰੋ।
- ਨਾਜ਼ੁਕ ਤਰੰਗ-ਲੰਬਾਈ ਨੂੰ ਅਲੱਗ ਕਰਨ ਲਈ ਬੈਂਡਪਾਸ ਫਿਲਟਰ (ਜਿਵੇਂ ਕਿ 0.5-20 ਮਿਲੀਮੀਟਰ) ਲਗਾਓ।
- ਫਿਲਟਰ ਕੀਤੇ ਡੇਟਾ ਤੋਂ RMS ਜਾਂ PV ਮੁੱਲਾਂ ਦੀ ਗਣਨਾ ਕਰੋ।
- ਵੈਕਿਊਮ ਚੱਕ ਸਿਮੂਲੇਸ਼ਨ:ਲਿਥੋਗ੍ਰਾਫੀ ਦੌਰਾਨ ਅਸਲ-ਸੰਸਾਰ ਕਲੈਂਪਿੰਗ ਪ੍ਰਭਾਵਾਂ ਦੀ ਨਕਲ ਕਰੋ।
ਡਾਟਾ ਪ੍ਰੋਸੈਸਿੰਗ ਅਤੇ ਗਲਤੀ ਸਰੋਤ
ਵਰਕਫਲੋ ਦੀ ਪ੍ਰਕਿਰਿਆ
- ਟੀਟੀਵੀ:ਅੱਗੇ/ਪਿੱਛੇ ਸਤਹ ਕੋਆਰਡੀਨੇਟਸ ਨੂੰ ਇਕਸਾਰ ਕਰੋ, ਮੋਟਾਈ ਦੇ ਅੰਤਰ ਦੀ ਗਣਨਾ ਕਰੋ, ਅਤੇ ਪ੍ਰਣਾਲੀਗਤ ਗਲਤੀਆਂ ਨੂੰ ਘਟਾਓ (ਜਿਵੇਂ ਕਿ, ਥਰਮਲ ਡ੍ਰਿਫਟ)।
- ਧਨੁਸ਼/ਤਾਣਾ:LSQ ਪਲੇਨ ਨੂੰ ਉਚਾਈ ਡੇਟਾ ਵਿੱਚ ਫਿੱਟ ਕਰੋ; ਬੋ = ਸੈਂਟਰ ਪੁਆਇੰਟ ਰੈਜ਼ੀਡਿਊਲ, ਵਾਰਪ = ਪੀਕ-ਟੂ-ਵੈਲੀ ਰੈਜ਼ੀਡਿਊਲ।
- ਮਾਈਕ੍ਰੋਵਾਰਪ:ਸਥਾਨਿਕ ਫ੍ਰੀਕੁਐਂਸੀ, ਕੰਪਿਊਟ ਅੰਕੜੇ (RMS/PV) ਫਿਲਟਰ ਕਰੋ।
ਮੁੱਖ ਗਲਤੀ ਸਰੋਤ
- ਵਾਤਾਵਰਣ ਕਾਰਕ:ਵਾਈਬ੍ਰੇਸ਼ਨ (ਇੰਟਰਫੇਰੋਮੈਟਰੀ ਲਈ ਮਹੱਤਵਪੂਰਨ), ਹਵਾ ਦੀ ਗੜਬੜ, ਥਰਮਲ ਡ੍ਰਿਫਟ।
- ਸੈਂਸਰ ਸੀਮਾਵਾਂ:ਪੜਾਅ ਸ਼ੋਰ (ਇੰਟਰਫੇਰੋਮੈਟਰੀ), ਤਰੰਗ-ਲੰਬਾਈ ਕੈਲੀਬ੍ਰੇਸ਼ਨ ਗਲਤੀਆਂ (ਕੰਫੋਕਲ), ਸਮੱਗਰੀ-ਨਿਰਭਰ ਪ੍ਰਤੀਕਿਰਿਆਵਾਂ (ਕੈਪਸੀਟੈਂਸ)।
- ਵੇਫਰ ਹੈਂਡਲਿੰਗ:ਕਿਨਾਰਿਆਂ ਨੂੰ ਬਾਹਰ ਕੱਢਣ ਦੀ ਗਲਤ ਅਲਾਈਨਮੈਂਟ, ਸਿਲਾਈ ਵਿੱਚ ਗਤੀ ਪੜਾਅ ਦੀਆਂ ਗਲਤੀਆਂ।

ਪ੍ਰਕਿਰਿਆ ਦੀ ਆਲੋਚਨਾ 'ਤੇ ਪ੍ਰਭਾਵ
- ਲਿਥੋਗ੍ਰਾਫੀ:ਲੋਕਲ ਮਾਈਕ੍ਰੋਵਾਰਪ DOF ਨੂੰ ਘਟਾਉਂਦਾ ਹੈ, ਜਿਸ ਨਾਲ CD ਪਰਿਵਰਤਨ ਅਤੇ ਓਵਰਲੇ ਗਲਤੀਆਂ ਹੁੰਦੀਆਂ ਹਨ।
- ਸੀਐਮਪੀ:ਸ਼ੁਰੂਆਤੀ TTV ਅਸੰਤੁਲਨ ਗੈਰ-ਇਕਸਾਰ ਪਾਲਿਸ਼ਿੰਗ ਦਬਾਅ ਵੱਲ ਲੈ ਜਾਂਦਾ ਹੈ।
- ਤਣਾਅ ਵਿਸ਼ਲੇਸ਼ਣ:ਧਨੁਸ਼/ਵਾਰਪ ਵਿਕਾਸ ਥਰਮਲ/ਮਕੈਨੀਕਲ ਤਣਾਅ ਵਿਵਹਾਰ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ।
- ਪੈਕੇਜਿੰਗ:ਬਹੁਤ ਜ਼ਿਆਦਾ TTV ਬੰਧਨ ਇੰਟਰਫੇਸਾਂ ਵਿੱਚ ਖਾਲੀ ਥਾਂਵਾਂ ਪੈਦਾ ਕਰਦਾ ਹੈ।
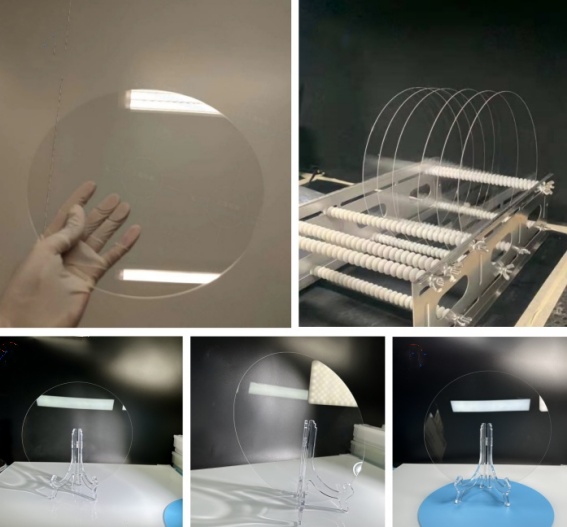
XKH ਦਾ ਨੀਲਮ ਵੇਫਰ
ਪੋਸਟ ਸਮਾਂ: ਸਤੰਬਰ-28-2025